CMG (Control Momentum Gyroscope)
제어 모멘텀 자이로스코프(CMG)는 자이로스코프의 원리로 토크를 발생시켜 위성의
자세를 제어하는 구동기 입니다.
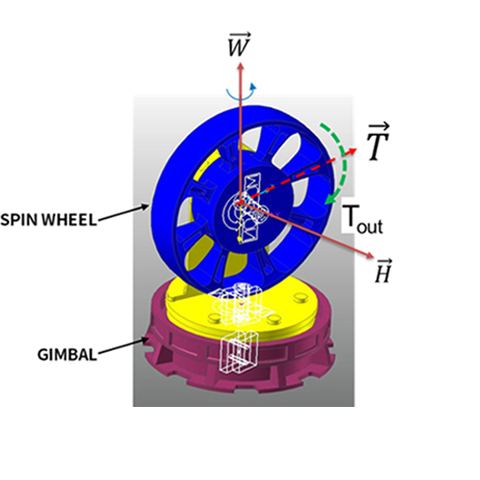
CMG는 고속으로 회전하는 회전자와, 회전자의 각 운동량을 구동하는 전동 짐벌로
구성됩니다. 회전자의 고속회전으로 각 운동량이 발생하고, 이를 구동하는 짐벌에
의해 발생하는 토크를 이용하여 위성의 자세를 정밀 제어 합니다.
CMG는 적은 소모전력으로도 큰 토크를 발생 시킬 수 있고, 신속한 응답특성으로
고기동/정밀제어가 요구되는 위성에 필수적인 방법입니다.
CMG (Control Momentum Gyroscope)
제어 모멘텀 자이로스코프(CMG)는 자이로스코프의 원리로 토크를 발생시켜 위성의
자세를 제어하는 구동기 입니다.
CMG는 고속으로 회전하는 회전자와, 회전자의 각 운동량을 구동하는 전동 짐벌로
구성됩니다. 회전자의 고속회전으로 각 운동량이 발생하고, 이를 구동하는 짐벌에
의해 발생하는 토크를 이용하여 위성의 자세를 정밀 제어 합니다.
CMG는 적은 소모전력으로도 큰 토크를 발생 시킬 수 있고, 신속한 응답특성으로
고기동/정밀제어가 요구되는 위성에 필수적인 방법입니다.